728x90
학습시킨 yolov4-tiny모델을 python코드로 작성하여 실행하게 했다.
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
|
import cv2 #영상처리를 하기 위한 라이브러리
import numpy as np #박스를 그리고 좌표를 얻기 위한 라이브러리
# 웹캠 신호 받기
VideoSignal = cv2.VideoCapture(0)
captured_num = 0
text=''
#----------가중치 파일------------------------------------------------------------------------------------------------
YOLO_net = cv2.dnn.readNet('yolov4-tiny-hyeok_last.weights','yolov4-tiny-hyeok.cfg')
classes = []
with open('package.names', "r") as f:
classes = [line.strip() for line in f.readlines()]
layer_names = YOLO_net.getLayerNames()
output_layers = [layer_names[i - 1] for i in YOLO_net.getUnconnectedOutLayers()]
#output_layers = [layer_names[i[0] - 1] for i in YOLO_net.getUnconnectedOutLayers()]
#----------가중치 파일------------------------------------------------------------------------------------------------
while True:
# 웹캠 프레임
ret, frame = VideoSignal.read()
frame = cv2.resize(frame,(416,416))
h, w, c = frame.shape
text=''
# YOLO 입력
blob = cv2.dnn.blobFromImage(frame, 0.00392, (416, 416), (0, 0, 0),True, crop=False)
YOLO_net.setInput(blob)
outs = YOLO_net.forward(output_layers)
class_ids = []
confidences = []
boxes = []
for out in outs:
for detection in out:
scores = detection[5:]
class_id = np.argmax(scores)
confidence = scores[class_id]
if confidence > 0.5:
# Object detected
center_x = int(detection[0] * w)
center_y = int(detection[1] * h)
dw = int((detection[2]) * w)
dh = int((detection[3]) * h)
# Rectangle coordinate
x = int(center_x - dw / 2)
y = int(center_y - dh / 2)
boxes.append([x, y, dw, dh])
confidences.append(float(confidence))
class_ids.append(class_id)
indexes = cv2.dnn.NMSBoxes(boxes, confidences, 0.8, 0.4)
for i in range(len(boxes)):
if i in indexes:
x, y, w, h = boxes[i]
label = str(classes[class_ids[i]])
score = confidences[i]
# 경계상자와 클래스 정보 이미지에 입력
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 0, 255), 1)
cv2.imshow("YOLOv4", frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
VideoSignal.release()
|
cs |
output_layers = [layer_names[i - 1] for i in YOLO_net.getUnconnectedOutLayers()]
#output_layers = [layer_names[i[0] - 1] for i in YOLO_net.getUnconnectedOutLayers()]
이 부분이 있는데 원래 아래 코드로 실행이 됬었는데 안되서 위 코드로 바꾸었다. 웨지감자
1. cv2 설치

위와 같이 오류가 나오면 anaconda prompt창을 열고 pip install opencv-python입력


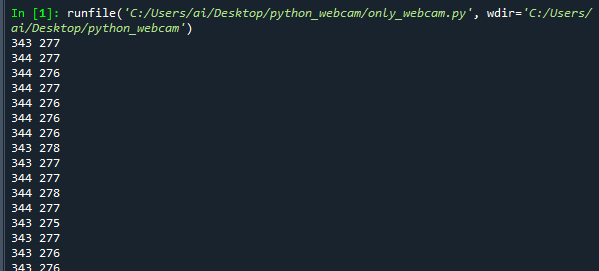
416x416인 상황에서 박스쳐진 중심값 좌표(x,y)를 반환하고 있다.
왼쪽위가 (0,0) 오른쪽 아래가 (416,416)이다. 지금 사진으로 보이는 택배의 중심값이 (343,277)언저리 인 것을 확인 할 수 있다.
728x90
'STUDY > YOLO' 카테고리의 다른 글
| opencv gpu (2) (0) | 2022.05.24 |
|---|---|
| opencv gpu (1) (0) | 2022.05.24 |
| YOLO_Label사용 (0) | 2022.05.20 |
| anaconda 설치 (0) | 2022.05.19 |
| yolov4-tiny custom 학습 (0) | 2022.05.13 |



댓글